COINV振动全息AVD一入三出测量技术
资源下载
摘要
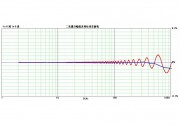
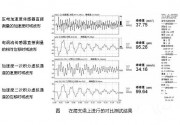
本技术基于东方所创新的全程微积分算法,实现了动态信号测量过程中的实时微积分转换。基于该技术,只需一个振动传感器,即可长时间连续实时获取振动的加速度A、速度V和位移D三路信号,解决了工程中信号微积分转换的国际难题。






Loading the content... Loading depends on your connection speed!